RoomBridge
Familiar rooms become viewfinders and vehicles.
Early prototype captures on Apple Vision Pro, June 2025.
The problem
Spatial computing still mostly floats flat windows into your living room. RoomBridge asks a different question: what if the room itself became the interface — physically safe and fully mapped, but visually transformed into a vehicle, a viewport, or a destination?
What exists today
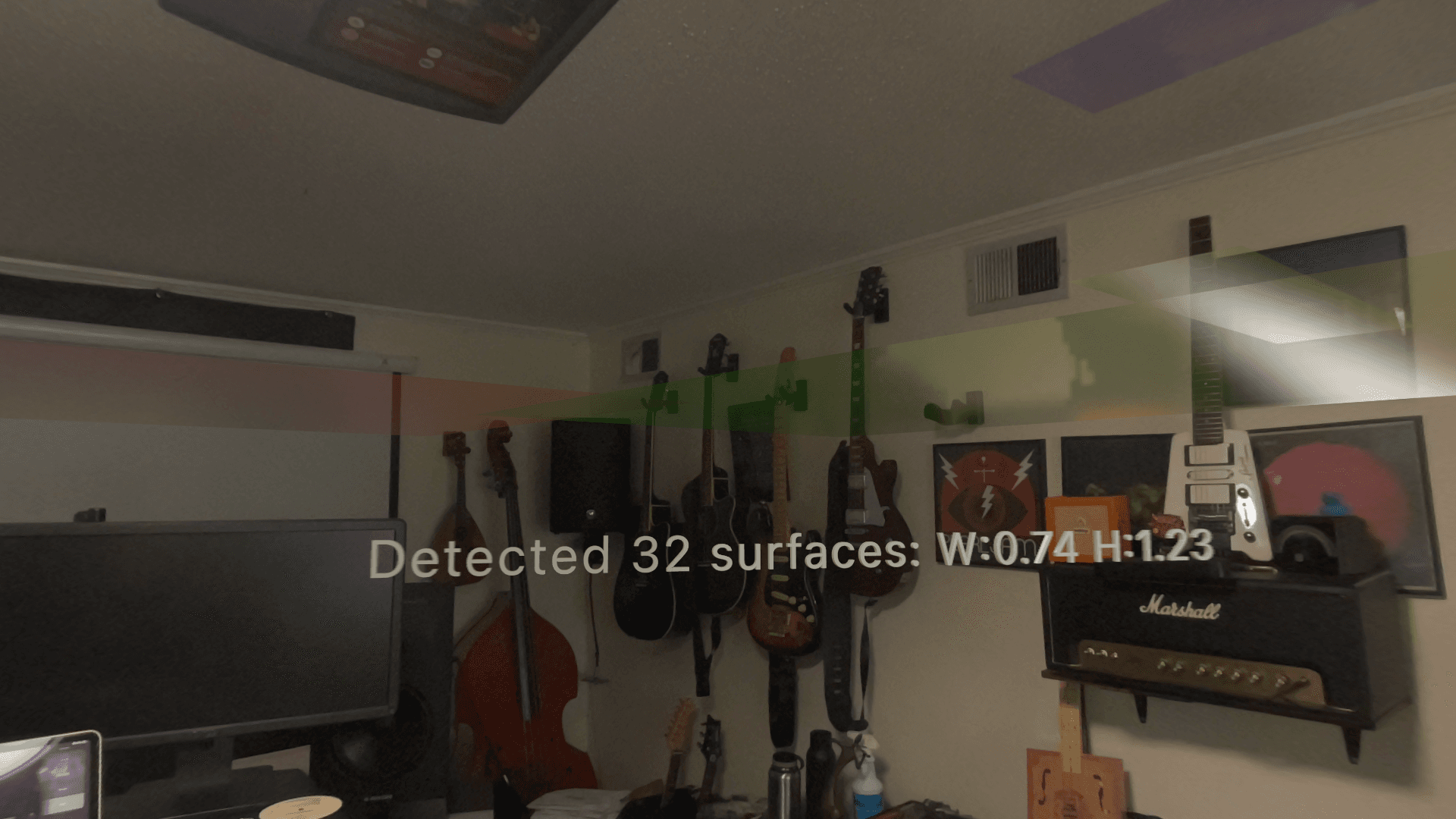
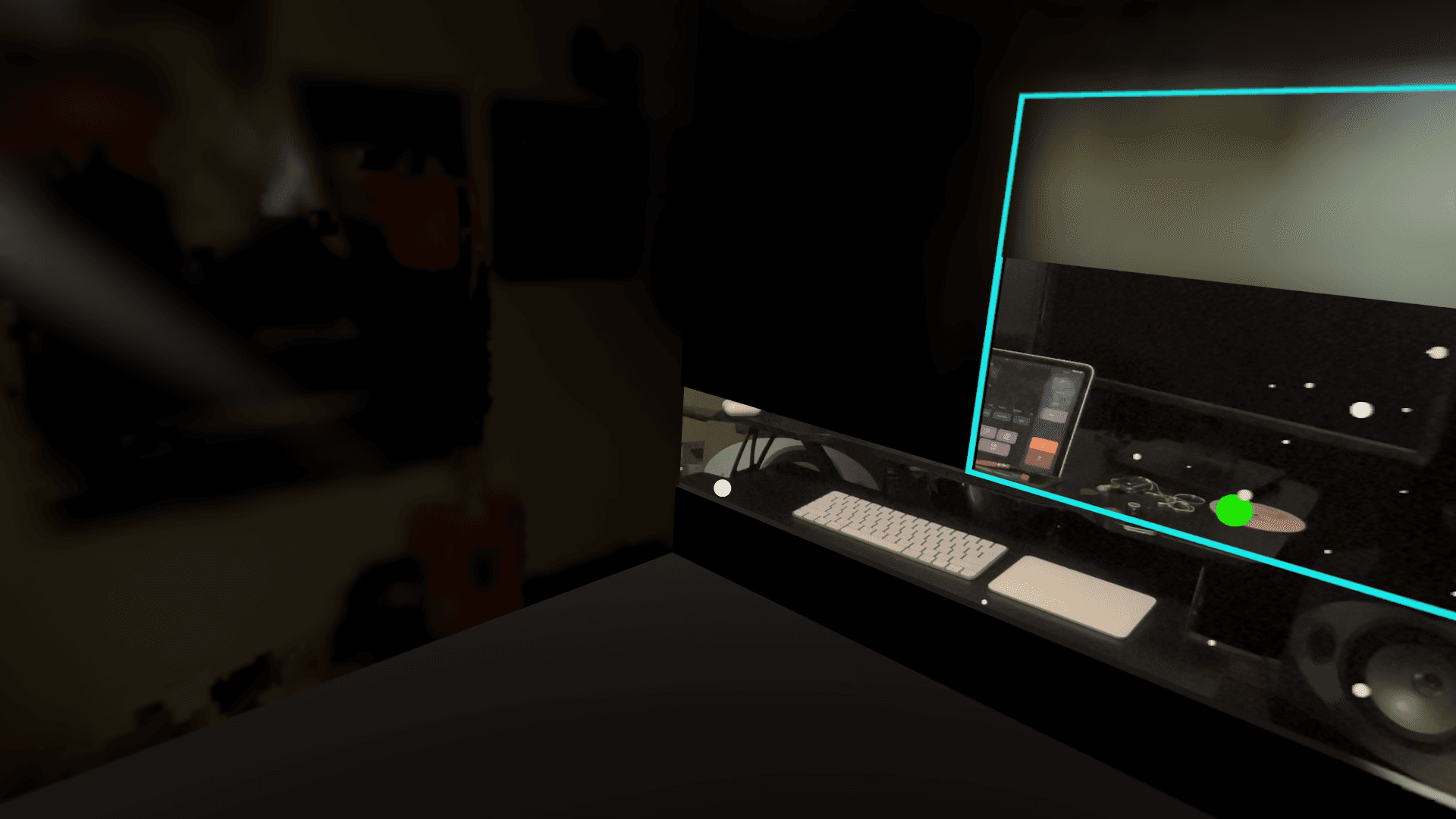
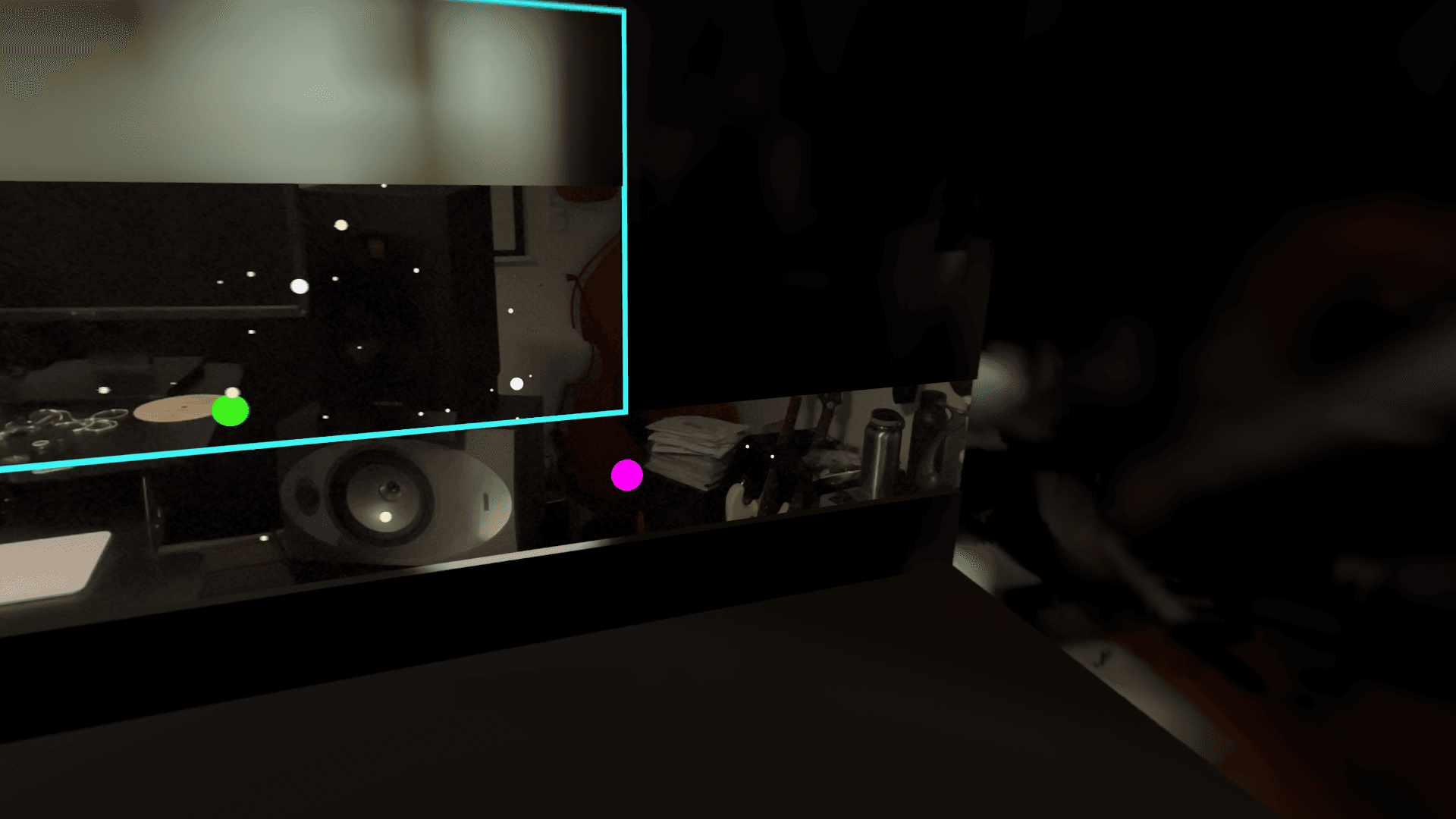
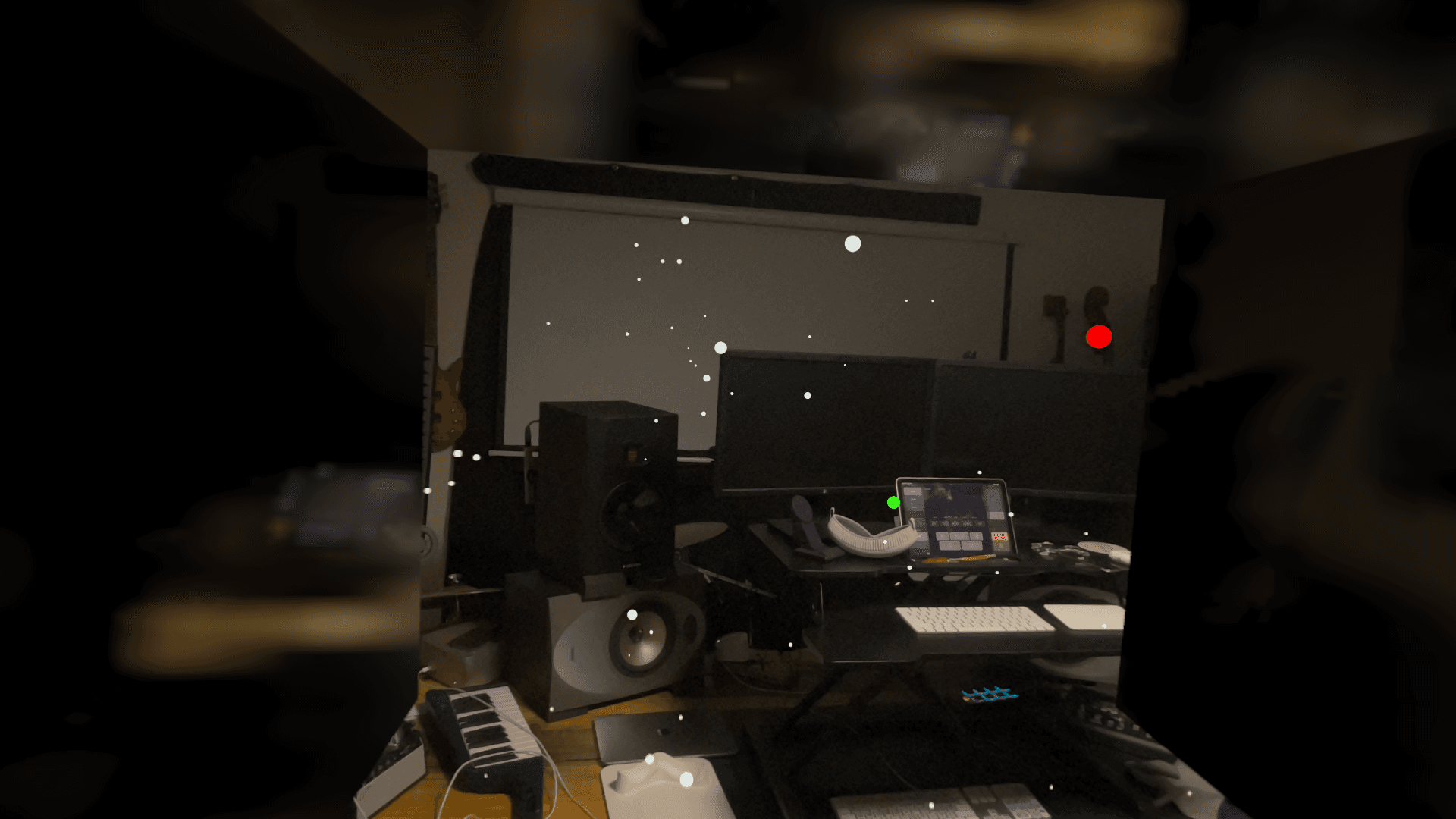
An early working visionOS prototype, built and tested on Apple Vision Pro. It anchors content to detected real-world surfaces, experiments with glass materials and spatial panels, offers an environment-selection UI, and prototypes an early “Glass Elevator” interaction that turns a familiar room into a launch point.
What I directed, built, and tested
I set up a dedicated visionOS workspace and, through AI-assisted development, built and tested the prototype on device. I directed the interaction model, the spatial anchoring behavior, the glass-surface treatment, and the Glass Elevator concept — then iterated against how it actually felt to wear and move through a transformed room.
What I learned
Presence comes from anchoring to the real room, not replacing it. Safety and comfort are interaction requirements, not afterthoughts. And once the room becomes the canvas, gaze and voice carry far more of the experience than hand controls.
Next prototype step
A polished end-to-end demo — room to destination and back — plus full environment rendering, and an accessibility mode where a remote helper assists a Vision Pro user through a spatial reconstruction rather than a flat camera feed.